What if intelligent behavior does not require massive computation or internal models of the world? Recent advances in neurally inspired robotics suggest exactly this. Drawing on Perceptual Control Theory (PCT), Barter & Yin (2021) have demonstrated that natural and artificial behavior emerge from hierarchical control of perception rather than from linear stimulus–response logic. This line of work resonates with ongoing RDI at NeuroLab at Laurea, where insights from neuroeconomics and behavioral science are applied to solve practical societal challenges. These include sustainable consumption and behavior change, in line with Laurea’s strategy for the circular economy.
 Photo by Freepik
Photo by Freepik
From stimulus–response to purposeful control
For over a century, both psychology and engineering have been dominated by a deceptively simple assumption that behavior is the output caused by inputs. This linear causation paradigm underlies behaviorism, classical cognitive science, and many modern AI architectures (Paul et al., 2023; Anderson, 1991).
PCT was formulated by William T. Powers (1973, Powers et al. 1960), and it offers a radically different account of behavior (Yin 2020). In PCT, behavior is understood as the continuous process by which organisms maintain their perceptions aligned with internally specified reference states through closed negative feedback (Yin 2024). For example, a person who wants to eat ice cream (an internally specified reference state) does not execute a fixed sequence of actions in response to stimuli. Instead, a person varies their movements and choices, such as where to walk or which shop to enter, so that their perceived proximity to obtaining ice cream matches an internally specified reference, despite changing circumstances.
The ideas of PCT were initially controversial, partly because they contradicted entrenched metaphors borrowed from engineering (Lake et al., 2017; Paul et al., 2023). Recently, however, evidence from studies of living organisms ((Barter et al. 2015, Bartholomew et al. 2016, Fan et al. 2012, Kim et al. 2014) and neurally inspired robotics (Barter & Yin 2021) has increasingly supported PCT as a unifying framework, showing that closed-loop control principles are sufficient to account for adaptive behavior in biological systems as well as to generate robust behavior in artificial ones.
Perceptual control theory in brief
At its core, PCT proposes three foundational principles: control of input, negative feedback error correction, and hierarchical organization of control. According to this view, living systems regulate their behavior by minimizing the difference between what they currently perceive and internally specified reference values (Marken 2021, Powers 1973, Yin 2024). These reference values are target states generated within the organism, against which ongoing perception is continuously compared. In other words, behavior functions to keep certain perceived variables close to desired states despite disturbances.
For example, if a child wants ice cream, they adjust their behavior to get it. This overall process of control can include, for example, asking their parents for money or looking for an open ice cream kiosk.
According to PCT, a person’s higher-level goals set the reference values of lower-level control loops. This makes it possible to maintain controlled action at multiple levels. In PCT, control loops work so that behavior emerges from continuous real-time feedback. PCT was originally presented as a theoretical mathematical model (Powers 1973; Powers et al. 1960), but it has since gained empirical support from both neurophysiological experiments (Yin 2013, 2014) and robotics (Barter & Yin 2021). There is strong evidence that the brain functions as a hierarchical control system.
Yin’s neurobiological evidence for the brain as a control hierarchy
Yin’s (2013, 2014, 2024) work in neurobiology provides strong empirical validations of the PCT. Through a series of converging experimental studies on the basal ganglia, Yin and his collaborators demonstrated that neural circuits regulate controlled variables. These variables include, for example, velocity and posture, whose internally generated reference values are continuously adjusted within a hierarchical control system (Barter et al. 2015, Fan et al. 2012, Yin 2013).
At the level of joint and limb control, electrophysiological recordings from the basal ganglia reveal neural activity that scales smoothly with movement velocity and movement (Fan et al. 2012, Kim et al. 2014). These findings indicate that the basal ganglia regulate how a movement state evolves. In control-theoretic terms, the controlled variable is the perceptual state of motion, while muscle activity emerges as a lower-level means of error correction.
At a higher hierarchical level, the basal ganglia output also tracks global body configuration and posture across whole-body movements. Studies have shown that neural activity in basal ganglia output correlates with overall posture, movement vigor, and spatial orientation and remains stable across changes in specific motor patterns (Barter et al., 2015; Fan et al., 2012; Kim et al., 2014).
Yin’s empirical studies convincingly anchor Powers’ original formulation (Powers 1973) in neuroanatomy and physiology. In this way, PCT remains not merely an abstract model, but gains concrete support especially at the level of motor control. Whereas intentionality was for a long time considered only a philosophical concept, it has now returned to the research field as an important concept for explaining the behavior of humans and other organisms as goal-directed action despite disturbances (Yin 2013, 2014, 2025).
The Barter and Yin robot: Proof in silicon and steel
Robotics also provides additional evidence for PCT. Joseph Barter and Henry Yin (2021) built an energy-efficient four-legged robot based on the operating principles of a biological model, that is, PCT. Its behavior was governed by hierarchical control systems, allowing the robot to maintain a stable posture and move through unpredictable environments despite external disturbances (Barter & Yin 2021).
Each control module in the robot regulated its sensory input through PCT-like feedback. Thanks to this hierarchical structure, stable movement emerged from the continuous reduction of perceptual errors. The robot’s behavior therefore appears flexibly adapted to its environment, and its operation closely resembles that of living organisms (Barter & Yin 2021).
To illustrate the robot’s architecture, let us consider one of its joint control loops. Each joint in the robot is equipped with analog sensors that measure joint angle and angular velocity. The controlled variable is thus the state of the joint’s position and movement. The perceptual signals produced by the robot’s sensors are compared with the reference value provided by higher-level posture and/or locomotion controllers. Differences between the perceived state and the reference value generate error signals, which are then converted into reference values for lower-level controllers; these, in turn, directly control the motors (Barter & Yin 2021).
The robot’s functioning and structure are similar to the joint- and limb-level regulation observed by Yin in mammals (Bartholomew et al. 2016; Kim et al. 2014; Yin 2017). In both systems, control is achieved by stabilizing perceptual variables, while force production is left to the lower levels of the system.
Together, neurophysiological studies and robotic applications strengthen the evidence for PCT’s central arguments: behavior is the continuous control of perception through closed-loop regulation, which in turn interacts with the environment.
PCT and its implications for organizations and the green transition
Based on these findings, PCT also offers an interesting perspective on robotics and the green transition. PCT-based autonomous robots can operate in ways that allow them to adapt to their environment in an energy-efficient and purposeful manner. These robots continuously respond to information from their surroundings and adjust their actions accordingly. Because they process analogue signals, there is no need to convert them into digital form, which makes the software energy-efficient. This improves energy efficiency compared with digital systems that rely on pre-programmed, heavier, and less flexible operating models (Muru & Rassõlkin 2025).
In other words, the robot is an active agent that independently shapes its own behaviour based on the environment it perceives. When a system can adapt to changing conditions, it can operate efficiently and use energy more wisely.
The same way of thinking is also useful in human action and organizations from the perspective of the green transition. Sustainability is unlikely to be achieved solely by following rules or through external control; instead, it is essential to support people in setting goals that are compatible with energy efficiency. What matters is how sustainability becomes part of an individual’s or an organization’s values, goals, and identity. When sustainability is seen as a genuine part of everyday action, commitment to it also becomes stronger. This also applies to companies: the better responsibility and sustainability are linked to an organization’s core goals, the more effectively they are implemented in practice.
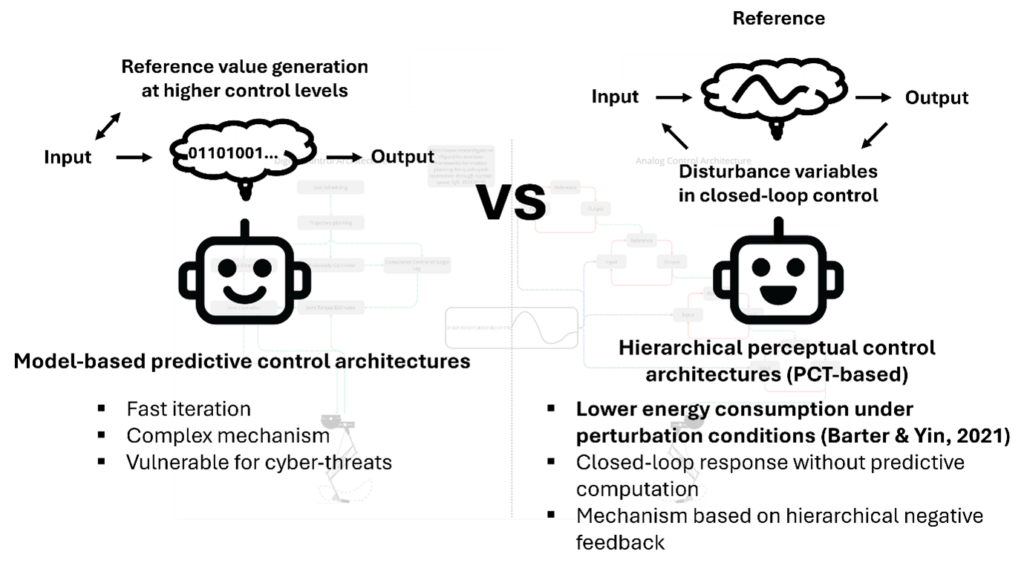 Figure 1. Comparison of predictive digital control and hierarchical perceptual control architectures. The author’s synthesis is based on Barter and Yin (2021) and Powers (1973).
Figure 1. Comparison of predictive digital control and hierarchical perceptual control architectures. The author’s synthesis is based on Barter and Yin (2021) and Powers (1973).
Toward a science of consilience
PCT began as a mathematical theory, but it has developed into a broad framework for understanding the behavior of living beings across fields ranging from neuroscience and psychology to robotics and organizational development. PCT helps explain the diversity of behavior through a set of simple underlying principles.
The analogue robot developed by Barter and Yin (2021) follows the same basic principle as living organisms. It purposefully regulates perception through a hierarchical feedback loop. It is remarkable how such a simple operating principle can support also human behavior in very different kinds of environments. Henry Yin captures this well:
“The hierarchical control organization, using the basic control loop as building blocks, can generate extremely complex behavior. But the complexity of the behavioral output belies the simplicity of the underlying computational mechanisms.” (Yin 2016, s.558)
This article is based on the authors’ earlier, wide-ranging texts and data collected, e.g., for project applications. The SimpleAI tool has been used for structure and content ideation.
Authors
- Lauri Keino, a Bachelor of Business Administration (BBA) student in Information Technology, completed an internship at NeuroLab and was responsible for the technical aspects of robotics as well as the figure included in the article.
- Suvi Sivén, Lecturer (Master of Economics), was responsible for the section describing the environmental impacts of robotics.
- Jyrki Suomala, Principal Lecturer (Docent), was responsible for the behavioral science section of the article.
References
- Barter, J. W., Li, S., Lu, D., Bartholomew, R. A., Rossi, M. A., Shoemaker, C. T., Salas-Meza, D., Gaidis, E., & Yin, H. H. 2015. Beyond reward prediction errors: The role of dopamine in movement kinematics. Frontiers in Integrative Neuroscience, 9.
- Barter, J. W., & Yin, H. H. 2021. Achieving natural behavior in a robot using neurally inspired hierarchical perceptual control. Iscience, 24(9), 102948.
- Bartholomew, R. A., Li, H., Gaidis, E. J., Stackmann, M., Shoemaker, C. T., Rossi, M. A., & Yin, H. H. 2016. Striatonigral control of movement velocity in mice. European Journal of Neuroscience, 43(8), 1097–1110.
- Fan, D., Rossi, M. A., & Yin, H. H. 2012. Mechanisms of Action Selection and Timing in Substantia Nigra Neurons. The Journal of Neuroscience, 32(16), 5534–5548.
- Kim, N., Barter, J. W., Sukharnikova, T., & Yin, H. H. 2014. Striatal firing rate reflects head movement velocity. European Journal of Neuroscience, 40(10), 3481–3490.
- Lake, B. M., Ullman, T. D., Tenenbaum, J. B., & Gershman, S. J. 2017. Building machines that learn and think like people. Behavioral and Brain Sciences, 40.
- Marken, R. S. 2021. The Study of Living Control Systems: A Guide to Doing Research on Purpose (1st ed.). Cambridge University Press.
- Marken, R., Kennaway, R., & Gulrez, T. 2022. Behavioral illusions: The Snark is a Boojum. Theory & Psychology, 32(3), 491–514.
- Muru, J., & Rassõlkin, A. 2025. A Scoping Review of Energy Consumption in Industrial Robotics. Machines, 13(7), 542.
- Paul, L. A., Ullman, T. D., De Freitas, J., & Tenenbaum, J. 2023. Reverse-engineering the self.
- Powers, W. T. 1973. Behavior: The control of perception. Aldine Publ.
- Powers, W. T., Clark, R. K., & Farland, R. L. M. 1960. A General Feedback Theory of Human Behavior: Part I. Perceptual and Motor Skills, 11(1), 71–88.
- Yin, H. 2024. The integrative functions of the basal ganglia (First edition). CRC Press.
- Yin, H. H. 2013. Restoring Purpose in Behavior. In G. Baldassarre & M. Mirolli (Eds.), Computational and Robotic Models of the Hierarchical Organization of Behavior (pp. 319–347). Springer Berlin Heidelberg.
- Yin, H. H. 2016. The Basal Ganglia and Hierarchical Control in Voluntary Behavior. In J.-J. Soghomonian (Ed.), The Basal Ganglia (pp. 513–566). Springer International Publishing.
- Yin, H. H. 2017. The Basal Ganglia in Action. The Neuroscientist, 23(3), 299–313.
- Yin, H. H. 2025. Aligning brain and behavior. Current Opinion in Behavioral Sciences, 62, 101487.